Table of Contents >> Show >> Hide
- Why Quadcopters Became the Drone Standard
- Meet the One-Propeller Drone Concept
- How Air Vanes Make Single-Rotor Control Possible
- Real-World Example: The Ball-Drone
- How It Compares With the Monospinner
- Small Drones, Big Lessons: Piccolissimo and Micro-Aircraft
- Advantages of a Drone With Only One Propeller
- The Big Challenges: Stability, Efficiency, and Payload
- Why This Design Matters for the Future of Drones
- Safety and Practical Considerations
- Experience Notes: What It Feels Like to Think Through a One-Propeller Drone
- Conclusion
- SEO Tags
Note: This publish-ready article is based on real drone engineering concepts, documented single-rotor experimental projects, university research, aviation safety guidance, and open-source flight-control knowledge. Source links are intentionally not included in the article body as requested.
Most people hear the word drone and instantly picture a quadcopter: four arms, four propellers, and that familiar angry-bee soundtrack buzzing over a park, a construction site, or someone’s backyard barbecue. The quadcopter has become the default shape of consumer drones because it works beautifully. Four rotors give a flight controller plenty of ways to balance lift, yaw, pitch, and roll. In other words, the machine has four tiny fans arguing with gravity from four different corners.
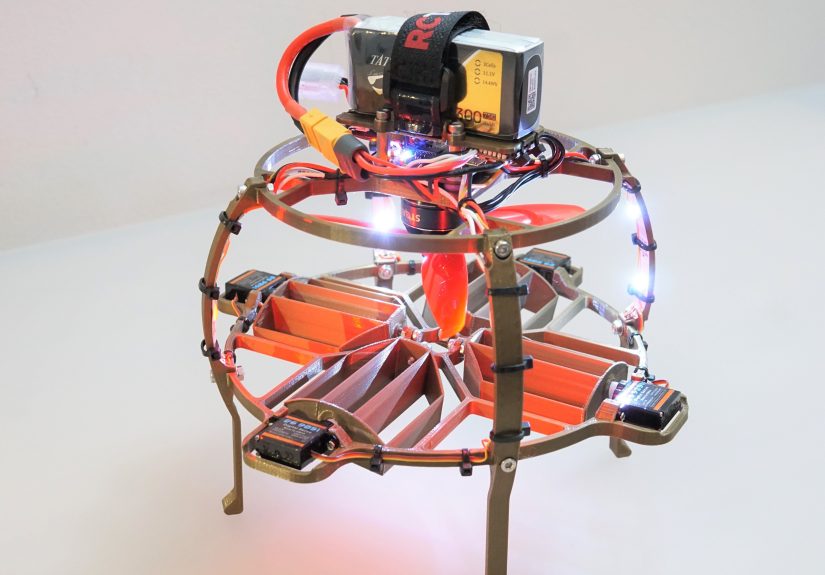
But what happens when a designer looks at that tidy formula and says, “Nice, but what if we remove three propellers?” That is where the one-propeller drone becomes fascinating. A design such as the single-rotor Ball-Drone, popularized by maker Benjamin Prescher, can hover and maneuver in a way that resembles a quadcopter while using only one main propeller for lift. Instead of four independent rotors, it relies on a central propeller, air vanes, servo control, and clever flight software to stay balanced. It is part flying robot, part engineering puzzle, and part “please explain this to my physics teacher.”
This kind of single propeller drone is not simply a helicopter with fewer parts. Traditional single-rotor helicopters usually need a tail rotor or another anti-torque system. A one-propeller drone design like the Ball-Drone uses airflow management and electronic stabilization to control movement. It does not replace quadcopters overnight, but it shows how creative drone design can become when builders stop treating four rotors as a law of nature.
Why Quadcopters Became the Drone Standard
To understand why a one-propeller drone is unusual, it helps to understand why quadcopters are so common. A quadcopter uses four rotors, usually arranged in an X or plus-shaped layout. Two spin clockwise, and two spin counterclockwise. This helps cancel torque, which is the twisting force that would otherwise make the drone spin like a confused ceiling fan.
When a quadcopter wants to climb, all four motors speed up. When it wants to roll, pitch, or yaw, the flight controller changes the speed of individual motors. This gives the aircraft fast control authority. The machine can make thousands of small corrections per second, which is why even inexpensive drones can hover smoothly enough to make beginners feel like pilots rather than panic managers.
Quadcopters also benefit from a mature ecosystem. Brushless motors, electronic speed controllers, lithium polymer batteries, camera gimbals, GPS modules, and open-source flight controllers are widely available. Software such as Betaflight, ArduPilot, PX4, and iNav has helped hobbyists and researchers create everything from tiny indoor racers to mapping drones and autonomous platforms.
So why challenge the quadcopter at all? Because engineering advances often begin with an annoying question: “Does it have to be this way?” The answer, in the case of drones, is no. It does not always have to be four propellers.
Meet the One-Propeller Drone Concept
A one-propeller drone is an aircraft that uses a single propeller as its primary source of lift. The tricky part is control. A spinning propeller does not merely push air downward; it also creates torque and airflow patterns that affect the entire craft. Without a smart control method, the drone may spin, wobble, tip over, or perform the classic “prototype flop,” which is funny only after nobody gets hurt and the propeller stops moving.
The Ball-Drone design tackles the problem by placing a propeller in a protective, roughly spherical structure and using four servo-actuated air vanes. These vanes sit in the propeller’s airflow. By changing their angles, they redirect air and create control forces. Think of the vanes as tiny aerodynamic rudders inside the wash of the propeller. They do not create lift by themselves, but they help steer the force created by the single rotor.
This gives the drone a quadcopter-like ability to pitch, roll, and yaw while using a very different mechanical layout. Instead of changing the speed of four motors, the aircraft changes the position of control surfaces. The motor provides thrust; the vanes shape that thrust. It is a bit like steering a garden hose by moving your thumb over the stream, except the hose is flying and the water is air.
How Air Vanes Make Single-Rotor Control Possible
Air vanes are the secret sauce in many singlecopter-style designs. A central propeller moves air through or around the body of the drone. Servo motors adjust small fins or vanes in that moving air. When the vanes tilt, they deflect airflow, producing moments that affect orientation.
In a quadcopter, each motor is both a source of lift and a control input. In a single-propeller drone, the motor mainly provides lift, while the vanes provide directional control. That means the design is more dependent on airflow. If the propeller is spinning too slowly, the vanes may not have enough air moving over them to control the craft effectively. If the propeller is spinning too fast, vibration and turbulence can make tuning harder.
The Role of Servos
Servos are small actuators that move to commanded positions. In a one-propeller drone, servos can tilt the air vanes quickly and repeatedly. Compared with brushless motors and electronic speed controllers, servos can be relatively inexpensive, which is one reason this design appeals to makers. However, servos introduce their own challenges: jitter, response delay, gear wear, and limited movement speed.
The Role of Flight Control Software
Modern drone flight is not just about hardware. It is about control loops. Sensors such as gyroscopes and accelerometers measure movement, while the flight controller calculates how to correct the aircraft. In the Ball-Drone approach, open-source drone software can be adapted so the system treats servo-controlled vanes as the main attitude-control surfaces. That is clever, but it also requires careful tuning because the drone does not behave like a normal four-motor racing quad.
Real-World Example: The Ball-Drone
The Ball-Drone project became popular because it made the one-propeller idea visually understandable. Instead of presenting a research diagram that looks like it escaped from a graduate thesis, the project showed a physical 3D-printed flying machine. It used common radio-control components: a LiPo battery, brushless motor, electronic speed controller, propeller, servos, receiver, and flight controller.
The second version of the Ball-Drone improved on earlier experiments by refining the frame, reducing unnecessary complexity, and addressing stability issues. One key lesson was the importance of center of gravity and control authority. A common beginner assumption is that hanging mass below the propeller automatically makes a drone stable, like a pendulum. In reality, drones are not magic chandeliers. A low center of gravity does not guarantee controllability if the control forces are too weak or poorly placed.
The design also moved toward grid-like vanes to reduce unwanted servo loading. When vanes experience high aerodynamic force, servos can jitter or struggle to hold position. Grid-style control surfaces can help manage airflow while lowering torque on the servo mechanism. That may sound like a small detail, but in experimental drones, small details often decide whether a machine flies gracefully or performs interpretive dance on the floor.
How It Compares With the Monospinner
The Ball-Drone is not the only one-propeller flying idea. Research projects such as the Monospinner have explored even more minimal designs. The Monospinner is notable because it has only one moving part: the propeller. It can hover and control its position through sophisticated control theory, using changes in thrust and the dynamics of the rotating body.
That sounds almost impossible at first. A typical aircraft uses multiple control inputs: motors, flaps, rudders, elevators, or tilting rotors. A highly underactuated aircraft has fewer control inputs than the number of motions it needs to manage. The Monospinner demonstrates that, with the right math, sensing, and feedback control, a flying vehicle can be controlled in ways that look completely unreasonable until they work.
The Ball-Drone and Monospinner share the same spirit: reduce mechanical complexity and let control systems do more of the work. The difference is that the Ball-Drone uses additional moving parts in the form of servo-controlled vanes, making it more approachable for hobbyists. The Monospinner is more extreme from a research standpoint because it pushes minimalism to the edge.
Small Drones, Big Lessons: Piccolissimo and Micro-Aircraft
Another related example is Piccolissimo, a tiny flying robot developed at the University of Pennsylvania. It demonstrated how single-motor and spinning-body designs can shrink drone hardware dramatically. Small flying robots face different physics than larger drones. Weight becomes brutally important, and every extra part feels like packing a bowling ball for a backpacking trip.
These micro-drone projects matter because they reveal why one-propeller designs are more than maker curiosities. Fewer motors can mean lower mass, fewer failure points, and simpler manufacturing. For tiny robots, removing even one component can make the difference between flight and a sad plastic pebble.
Advantages of a Drone With Only One Propeller
The most obvious advantage is mechanical simplicity. One main motor means fewer spinning assemblies than a quadcopter. In theory, that can reduce cost, weight, and maintenance. A single propeller also allows for unusual body shapes, including protective cages or spherical shells that may be safer for indoor testing.
A single-rotor design can also be visually distinctive. That matters for education, demonstrations, and robotics competitions. A classroom full of students may understand quadcopters, but a one-propeller drone immediately invites questions. Why does it not spin out of control? How do the vanes work? Why does the flight controller need different tuning? Suddenly, aerodynamics is not a textbook chapter; it is hovering in the room making tiny mechanical noises.
There may also be niche applications where a protected single-rotor drone could be useful. Indoor inspection, sensor carrying, light signaling, environmental monitoring, and robotics education are possible areas of interest. The design is not ideal for every task, but it encourages engineers to think beyond standard layouts.
The Big Challenges: Stability, Efficiency, and Payload
Every unusual aircraft design comes with trade-offs. A one-propeller drone may look simpler, but its control problem can be more difficult than a quadcopter’s. The flight controller has less direct authority. Instead of commanding four motors independently, it must manage a single thrust source and secondary control surfaces.
Payload is another limitation. A quadcopter can distribute lift across four rotors, while a single-propeller design depends heavily on one propeller’s thrust and the structure around it. Adding a camera, larger battery, or sensor package may change the center of gravity and make tuning harder. If you want buttery-smooth cinematic footage, a traditional stabilized camera drone still wins. A one-propeller experimental drone is more likely to produce video that says, “I am alive, but I am nervous.”
Efficiency is not guaranteed either. One large rotor can be efficient in some contexts, but ducts, cages, vanes, turbulence, and control losses can reduce performance. The actual efficiency depends on the propeller, airframe, motor, battery, and airflow path. In drone design, there is no free lunch; there is only lunch with aerodynamic drag.
Why This Design Matters for the Future of Drones
The most exciting thing about a single propeller drone is not that it will replace every quadcopter. It probably will not. The exciting part is that it expands the design conversation. Drones do not have to be locked into one shape. They can be quadcopters, hexacopters, fixed-wing aircraft, tilt-rotors, cyclorotors, monocopters, ducted fans, flapping-wing robots, or strange little spheres that look like they escaped from a robotics lab after midnight.
As sensors get cheaper and control software improves, unusual aircraft become more practical. Designs that were once too unstable can now be actively stabilized. Lightweight processors, inertial measurement units, and open-source software allow hobbyists and researchers to test ideas that previously required expensive labs.
Single-propeller designs also teach an important engineering lesson: fewer parts do not always mean easier design. Sometimes removing hardware makes the software problem harder. The drone may be mechanically simple but mathematically demanding. That trade-off is central to modern robotics. Designers often shift complexity from metal and plastic into code, sensors, and control algorithms.
Safety and Practical Considerations
Any drone with a propeller deserves respect. Even a small propeller can cause injury or damage if handled carelessly. A protected frame can reduce risk, but it does not make a flying machine harmless. Testing should be done in safe, controlled spaces, away from people, pets, roads, airports, and restricted airspace.
In the United States, recreational drone pilots must follow FAA safety rules, and many pilots need to complete basic safety education before flying. Commercial operations require additional certification. Rules can vary by country, state, city, and location, so drone pilots should check current requirements before flying. A clever design is fun; a clever design flown irresponsibly is just a news story waiting to be frowned at.
Experience Notes: What It Feels Like to Think Through a One-Propeller Drone
The best way to appreciate a one-propeller drone is to imagine approaching it not as a product, but as a problem. A normal quadcopter feels like a balanced table: four legs, four corners, obvious symmetry. A single-propeller drone feels more like balancing a broom on your palm while someone occasionally pokes it with a leaf blower. It can work, but you immediately understand that the control system has a busy day ahead.
One practical experience many makers describe with unconventional drones is the surprise of how much the first version teaches. The first prototype rarely behaves like the drawing. The frame flexes more than expected. The vanes create turbulence. A servo jitters. The center of gravity shifts after the battery is mounted. The drone lifts for half a second, tilts dramatically, and lands with the dignity of a dropped sandwich. That can be frustrating, but it is also the point. Experimental aircraft are honest teachers. They do not care how elegant the CAD model looked.
With a single-propeller design, tuning becomes part of the experience. On a quadcopter, the pilot can lean on years of community knowledge and default settings. With a one-propeller drone, the aircraft may require more patience. The relationship between propeller speed, vane angle, sensor filtering, and PID response is delicate. Too little correction and the drone drifts. Too much correction and it oscillates. A small change can make the difference between “stable hover” and “tiny flying washing machine.”
Another memorable part of the experience is how people react when they see it fly. A quadcopter hovering indoors is normal now. A spherical drone with one propeller and control vanes feels unusual enough to make people stop and ask questions. It has educational value because it exposes the hidden work that all drones perform. Viewers can actually see the control surfaces moving and understand that flight is not only about lift; it is about constantly correcting errors.
There is also a refreshing humility in this kind of project. It reminds builders that aviation rewards testing, documentation, and careful iteration. A successful one-propeller drone is not just a cool gadget. It is proof that engineering creativity still matters in a world full of polished consumer drones. The design may not carry a cinema camera over a mountain range, and it may not replace a commercial quadcopter for mapping or inspection. But as a learning platform, it is brilliant. It turns basic questions about thrust, torque, airflow, and control into something visible and exciting.
For hobbyists, educators, and robotics fans, the one-propeller drone is less about beating quadcopters and more about expanding imagination. It says: here is a flying machine that should be awkward, yet it flies. Here is a design that trades mechanical redundancy for aerodynamic creativity. Here is a reminder that the future of drones will not be built only by making today’s quadcopters slightly smaller, slightly faster, and slightly better at avoiding trees. Sometimes the future begins when someone removes three propellers and asks, “Now what?”
Conclusion
A drone that flies like a quadcopter but uses only one propeller is more than a novelty. It is a window into the strange, creative, and deeply technical world of experimental aerial robotics. The Ball-Drone shows how a central rotor, servo-actuated air vanes, smart software, and thoughtful mechanical design can create controlled flight in a form that looks nothing like a standard quadcopter. Research projects such as the Monospinner and Piccolissimo push the idea even further, proving that minimal aircraft can hover, steer, and inspire new approaches to drone engineering.
Will one-propeller drones replace quadcopters for everyday aerial photography? Probably not. Quadcopters remain practical, stable, and supported by a massive hardware and software ecosystem. But one-propeller designs matter because they challenge assumptions. They make drone builders rethink control, efficiency, safety, weight, and the relationship between hardware and software. In a field where many products look increasingly similar, a single-rotor flying sphere is a welcome reminder that engineering still has room for weird, wonderful ideas.